
9 Minuty
Wyniki niezależnego testu jazdy autonomicznej w Chinach
Buick Electra L7 zwycięża w niezależnym chińskim teście AD — Tesla w tyle
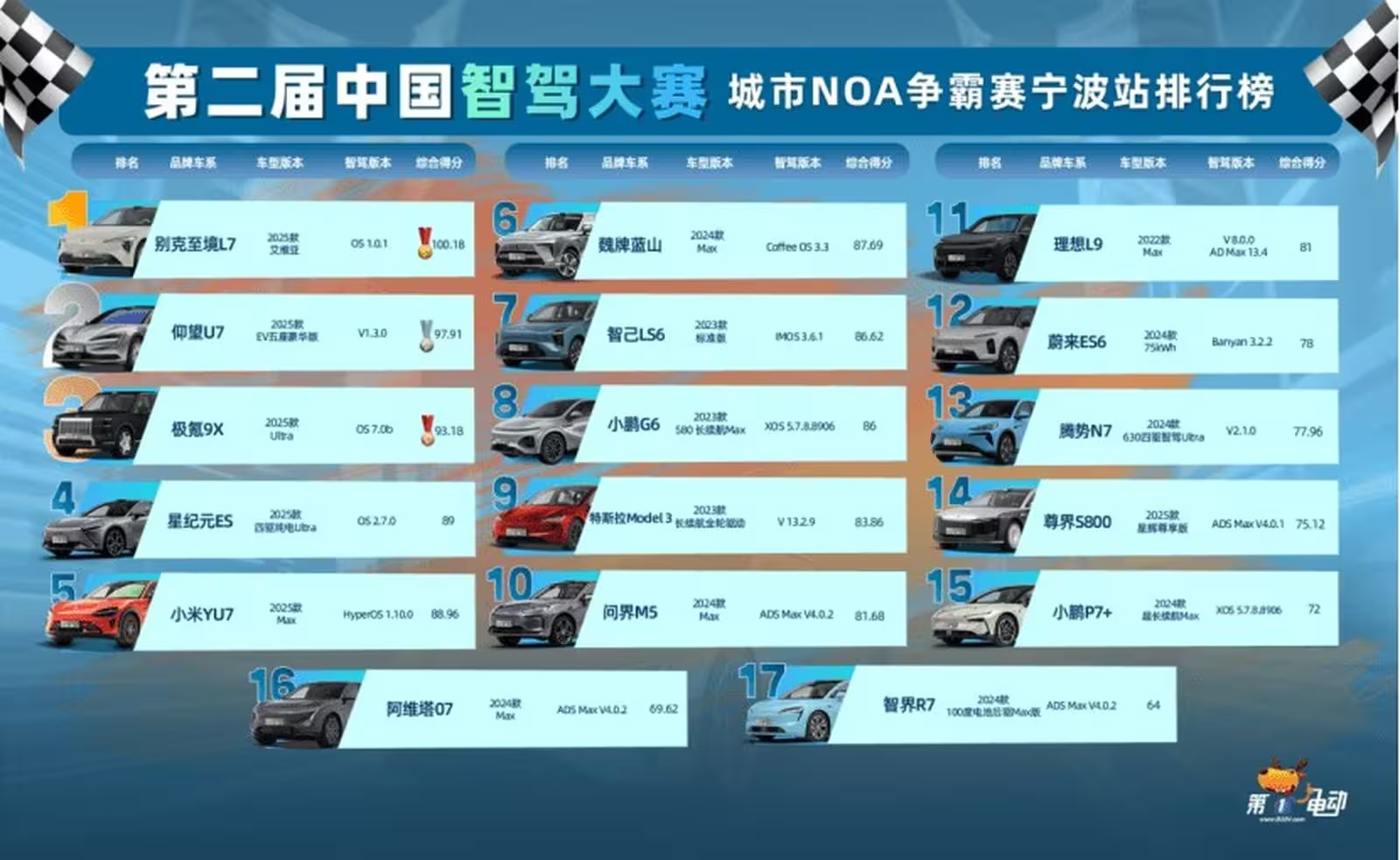
Zaledwie kilka dni po tym, jak Tesla poinformowała inwestorów, że pełna autonomia jest w zasięgu ręki, niezależny konkurs jazdy autonomicznej w Chinach przekazał znacznie bardziej zniuansowany obraz. Zorganizowana przez D1EV w Ningbo, prowincja Zhejiang, Druga Chińska Konkurencja Inteligentnego Wspomagania Jazdy (Second China Intelligent Assisted Driving Competition) sklasyfikowała SAIC-GM Buick Electra L7 na czele 17- samochodowej stawki, podczas gdy Tesla Model 3 zajęła dopiero dziewiąte miejsce.
Trasa o długości 29 kilometrów — obejmująca 28 sygnalizacji świetlnych, pięć punktów pośrednich i osiem wymagających stanowisk testowych — była utrzymywana w tajemnicy, aby uniemożliwić zespołom dopasowanie systemów do konkretnych scenariuszy. Ten poziom utajnienia ujawnił rzeczywiste mocne i słabe strony szerokiego spektrum systemów wspomagania kierowcy (ADAS) oraz zestawów do prowadzenia autonomicznego.
Kluczowe wyniki i klasyfikacja
Najważniejsze rezultaty
- 1st: Buick Electra L7 (SAIC-GM) — 100.18 points
- 2nd: BYD YangWang U7 — 97.91 points
- 3rd: Geely Zeekr 9X — 93.18 points
- 5th: Xiaomi YU7 — 88.96 points
- 9th: Tesla Model 3 — 83.86 points

Te wyniki wpisują się w szerszy trend: w Chinach wielu producentów samochodów i firm technologicznych szybko rozwija funkcje ADAS oraz elementy autonomiczne, często wykorzystując LiDAR i fuzję wielu czujników w połączeniu z wysokowydajnym mapowaniem i modelami sztucznej inteligencji. W praktyce oznacza to, że integracja czujników, jakość map oraz algorytmika percepcji i planowania stają się krytycznymi czynnikami decydującymi o rzeczywistej użyteczności systemów na publicznych drogach.
Analiza zwycięzcy
Dlaczego Electra L7 wygrała
Electra L7 to hybrydowy zasięgowo-elektryczny pojazd (EREV) SAIC-GM, łączący efektywny układ napędowy z solidnym stosem autonomicznym. Kluczowe znaczenie miało to, że był to pierwszy samochód w konkursie wyposażony w platformę Momenta R6 Flywheel Big Model AD, używaną w systemie Navigate on Autopilot (NOA). Duży model percepcji i planowania Momenta stawia na fuzję wielu czujników — ze szczególnym naciskiem na LiDAR — i wydaje się, że to połączenie zadecydowało o przewadze Electra L7 na trasie.

W praktyce ogromne modele percepcyjne, takie jak R6 Flywheel, potrafią lepiej uogólniać obserwacje z wielu typów czujników, co poprawia wykrywanie trudnych obiektów, przewidywanie zachowań innych uczestników ruchu i planowanie ścieżki w złożonych warunkach. W połączeniu z LiDAR-em, który dostarcza liniowe, gęste dane odległościowe, systemy te osiągają wyższą odporność wobec scenariuszy o niskim kontraście lub przeźroczystych przeszkód, gdzie sama wizja (kamery) może zawieść.
Podczas testu kilka segmentów w szczególności uwypukliło tę przewagę. Sztucznie skonstruowana przez organizatorów przeźroczysta plastikowa zasłona, zaprojektowana żeby symulować przeszkodę o niskiej widoczności, została wykryta jedynie przez sześć samochodów: Li Auto L9, YangWang U7, Nio ES6, Buick Electra L7, Zeekr 9X oraz Xiaomi YU7 — wszystkie te modele były wyposażone w LiDAR. Systemy oparte wyłącznie na wizji, w tym FSD/Intelligent Assisted Driving Tesli, całkowicie zignorowały tę pułapkę.
Trudności trasy i zachowania systemów
Wybrane wyzwania trasy i reakcje pojazdów
Trasa składała się z mieszanki wąskich osiedlowych pasów, ronda, skrętu z ograniczoną widocznością z zawracaniem, wiejskich dróg oraz sztucznie wprowadzonych przeszkód, aby ocenić nawigację, wybór pasa, wykrywanie obiektów i podejmowanie decyzji. W każdym z tych scenariuszy ujawniły się różnice w architekturze sensorów, algorytmach percepcji i strategiach planowania ruchu.
- Wąskie drogi: Zadania postawione przed systemami wymagały precyzyjnego trzymania pozycji i sprawnego omijania. Trzy samochody poprosiły o przejęcie kontroli przez kierowcę (Wey 07, Xiaomi YU7, Xpeng G6), co wskazuje na trudności z planowaniem kolizyjnym i oceną marginesów bezpieczeństwa.
- Ronda: Wszystkie pojazdy ukończyły odcinki z rondami, co pokazuje, że logika wyboru pasów i decyzje na skrzyżowaniach o stałym ruchu została poprawiona szeroko w branży.
- Obrót z martwym punktem (blind-turn U-turns): Ten manewr sprawił problemy kilku systemom; Nio ES6 i Xpeng G6 zgłosiły prośbę o przejęcie, a Denza N7 zboczyła z zalecanej trasy, co wskazuje na trudności z rozumieniem ograniczonej widoczności i przewidywaniem ryzyka.
- Przeźroczysta przeszkoda: Tylko samochody z LiDAR-em wykrywały ją konsekwentnie — podkreślając praktyczną zaletę sensorów dalmierzowych dla wykrywania obiektów o niskim kontraście.
- Skomplikowana trasa ze zawracaniem: Kilka modeli wjechało na niewłaściwe odcinki lub wymagało interwencji, co odkryło słabości w rozumowaniu trasowym przy niejednoznacznych znakach i oznakowaniach.

Dwa dodatkowe scenariusze — skrzyżowanie z prawoskrętem i jednoczesnym zawracaniem oraz słabo uczęszczana wiejska droga — jeszcze wyraźniej oddzieliły faworytów od reszty. Tesla Model 3 poradziła sobie z testem prawego skrętu, jednak brakowało jej spójności na całej trasie, co przyczyniło się do jej pozycji w środku stawki.
Implikacje dla Tesli i rynku AD
Co oznacza to dla Tesli i szerzej dla rynku autonomicznej jazdy
Tesla wciąż mocno komunikowała swoje dążenie do wykorzystania sztucznej inteligencji, robotaksów i pełnej autonomii, a Elon Musk zapowiadał możliwość bez nadzoru do końca 2025 r. W Ameryce Północnej narracja często skupia się na rywalizacji Tesla kontra Waymo (ten drugi prowadzi ograniczone operacje bez kierowców). Rynek chiński jednak pokazuje znacznie bardziej zatłoczone i dynamiczne środowisko: lokalni producenci i firmy technologiczne integrują LiDAR, mapowanie o wysokiej precyzji oraz podejścia oparte na dużych modelach AI, aby zwiększyć odporność funkcji AD w złożonych, mieszanych środowiskach miejskich i wiejskich.
Konfrontacja wyników testu daje przynajmniej dwa istotne wnioski:
- Wybór sensorów ma znaczenie. Systemy wyposażone w LiDAR wykazały wyraźną przewagę w wykrywaniu przeszkód i świadomości sytuacyjnej, szczególnie w przypadku przeźroczystych lub nisko kontrastowych zagrożeń.
- Obietnice „end-to-end” nie zastąpią spójnej, popartej scenariuszowym testowaniem wydajności. Pojedyncza udana demonstracja lub oświadczenie dla inwestorów nie przeważy wielokrotnych, zróżnicowanych testów w terenie, przeprowadzanych na publicznych drogach i w warunkach faktycznego użytkowania.
Kontekst rynkowy i produktowy
Znaczenie dla SAIC-GM, Tesli i innych graczy
Zwycięstwo Electra L7 zwiększa wiarygodność SAIC-GM na rynku, gdzie konsumenci i regulatorzy coraz mocniej koncentrują się na bezpieczeństwie ADAS i walidacji w rzeczywistych warunkach. Dla Tesli wynik jest przypomnieniem, że podejścia oparte wyłącznie na wizji nadal napotykają ograniczenia w niektórych zastosowaniach — zwłaszcza gdy w grę wchodzą duże modele percepcyjne i fuzja z LiDAR-em.
Warto zaznaczyć, że adopcja LiDAR-u w segmencie średnio- i wysokiej klasy samochodów staje się coraz bardziej realna ze względu na spadek kosztów sensorów i wzrost integracji oprogramowania. Partnerstwa OEM–AI, takie jak współpraca SAIC-GM z Momentum (Momenta), mogą przyspieszyć tę transformację, oferując gotowe do integracji rozwiązania perception+planning, które dają przewagę konkurencyjną w testach walidacyjnych i w codziennej eksploatacji.
Cytat uczestnika obserwującego konkurencję: "Electra L7 wykazywała spójne podejmowanie decyzji w zróżnicowanych scenariuszach. To jest kluczowe dla klientów i operatorów flot przy wyborze samochodów z funkcjami AD." To stwierdzenie podkreśla, że liczy się powtarzalność i zdolność systemu do adaptacji do nieznanych warunków.
Perspektywy i rekomendacje
Co dalej dla producentów, kupujących i regulatorów
Należy spodziewać się dalszej serii testów i publicznych demonstracji w miarę jak producenci dopracowują swoje systemy NOA i ADAS. Impet rozwoju w Chinach najpewniej doprowadzi do kolejnych partnerstw między producentami samochodów (OEM) i firmami AI, takimi jak Momenta, a także przyspieszy adopcję LiDAR-u w modelach średniej i wyższej klasy. W praktyce może to oznaczać, że w ciągu kilku najbliższych lat więcej pojazdów dostępnych na rynku będzie miało hybrydowe zestawy czujników (kamery + radar + LiDAR), wspierane przez duże modele percepcyjne.
Dla kierowców i nabywców flot kluczowa lekcja jest prosta: należy koncentrować się na zweryfikowanej wydajności systemu w rzeczywistych warunkach zamiast na obietnicach marketingowych. Testy takie jak wydarzenie D1EV są cenne, ponieważ wystawiają systemy na ukryte, zróżnicowane scenariusze — to lepszy miernik gotowości niż zaplanowane, skryptowane demonstracje.
Techniczne rekomendacje dla producentów i dostawców technologii AD:
- Inwestuj w hybrydową fuzję sensorów: połączenie LiDAR + kamery + radar zwiększa odporność systemu w różnorodnych warunkach środowiskowych.
- Rozwijaj duże modele percepcyjne i planistyczne: skalowalne architektury AI mogą lepiej uogólniać i adaptować się do nieznanych warunków na drodze.
- Skup się na walidacji w terenie: regularne, niezależne testy w ukrytych scenariuszach są kluczowe do wykrywania rzeczywistych słabości.
- Transparentność wyników: publikacja szczegółowych wyników testów buduje zaufanie klientów i regulatorów oraz ułatwia benchmarking konkurencji.
Wnioski praktyczne dla kupujących
Przy wyborze pojazdu z zaawansowanymi funkcjami wspomagania i autonomii warto brać pod uwagę nie tylko marketingowe deklaracje producentów, lecz także:
- Obecność wielosensorowego zestawu (szczególnie LiDAR);
- Dostępność aktualizacji oprogramowania i map wysokiej precyzji;
- Dowody z niezależnych testów i przypadków użycia w realnych warunkach;
- Wsparcie serwisowe i politykę bezpieczeństwa producenta.
Podsumowując: w miarę jak wyścig o autonomię nabiera tempa, zwycięzcami będą zespoły potrafiące dostarczyć bezpieczną, powtarzalną wydajność w nieprzewidywalnych warunkach drogowych. Ten test pokazuje, że Tesla ma jeszcze pole do pracy — przynajmniej w kontekście chińskim — podczas gdy gracze tradycyjni i lokalni wykorzystują swoją przewagę dzięki nowym zestawom sensorów i partnerstwom w obszarze AI.
Podsumowanie i najważniejsze punkty
Najważniejsze informacje z wydarzenia:
- Wydarzenie: Druga Chińska Konkurencja Inteligentnego Wspomagania Jazdy (D1EV), Ningbo
- Trasa: 29 km, 28 sygnalizacji, 5 punktów pośrednich, 8 stanowisk testowych
- Wygrana technologia: Momenta R6 Flywheel Big Model AD w Buick Electra L7
- Implikacja: Fuzja LiDAR + duże modele AI obecnie przewyższa rozwiązania oparte wyłącznie na wizji w złożonych scenariuszach
Im dłużej branża będzie testować systemy w realnych, ukrytych scenariuszach, tym lepiej będzie w stanie oddzielić rzeczywiście dojrzałe technologie od obietnic marketingowych. Dla operatorów flot i nabywców kluczowe pozostanie skupienie na sprawdzonej wydajności i zdolności systemu do powtarzalnego działania w różnych warunkach.
Źródło: autoevolution
Zostaw komentarz